Research
Ruthvik Bommena’s research focuses on developing six-degrees-of-freedom (6-DOF) spacecraft trajectory optimization algorithms with path inequality constraints. His work is centered around applications in in-space servicing and assembly (ISAM) missions, where the trajectories of servicing agents are simulated between a target spacecraft and a cargo vehicle. The developed methodologies are designed to be general and applicable to any dynamical model or orbital regime, provided the reference frame is centered on the target spacecraft. Current research specifically explores ISAM scenarios in Earth orbits, as well as in orbits around the Sun–Earth and Earth–Moon Lagrange Points. Simulations performed in the Sun–Earth system utilize a novel and robust target-relative Circular Restricted Three-Body Problem (CRTBP) dynamical model, developed by Bommena et al. This model employs a center-of-frame switch and scaled distance units to improve numerical convergence.
6-DOF Trajectory Optimization
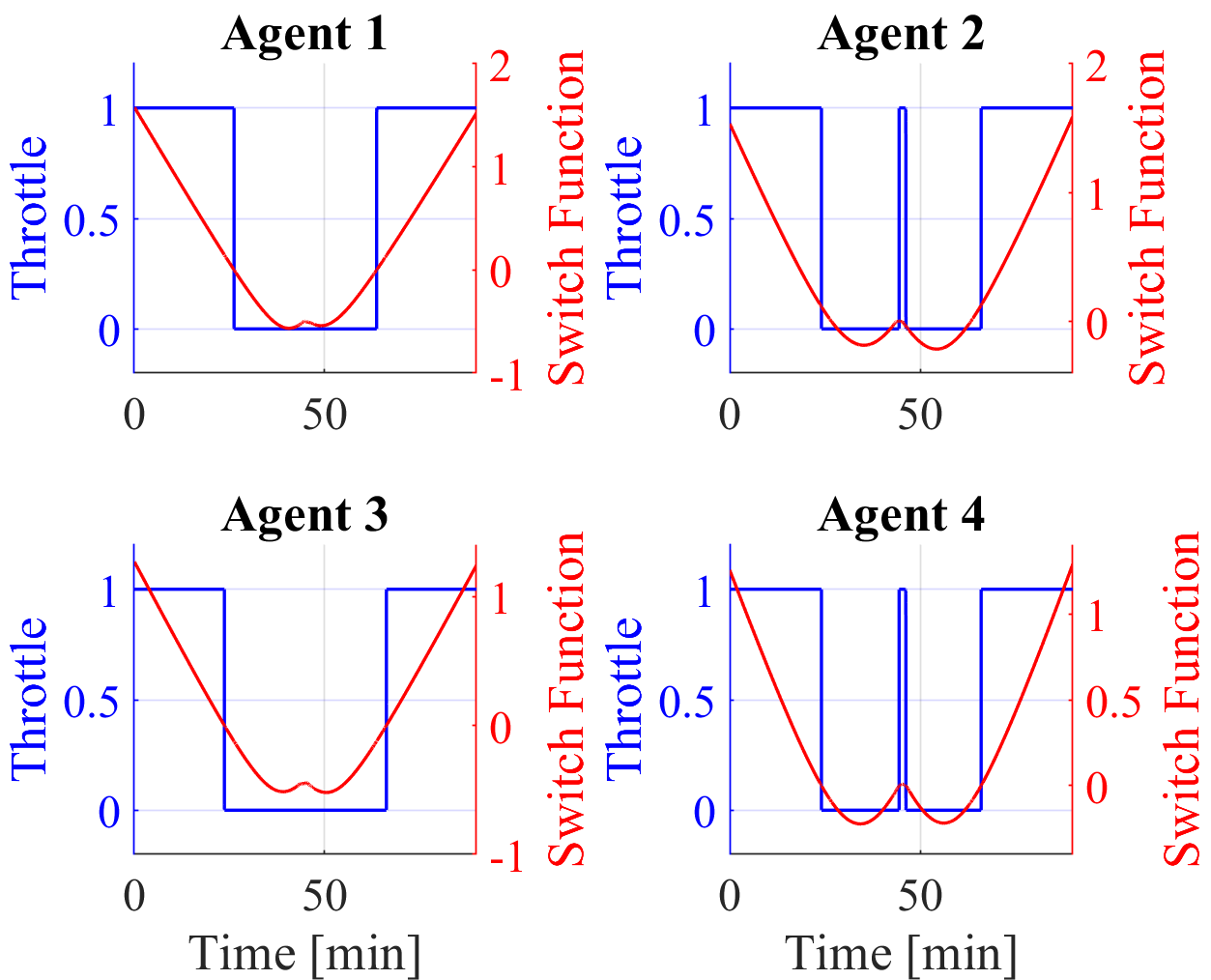
Indirect optimization techquines have been utilized to develop a novel methodology for 6-DOF trajectory optimization by coupling the translational and rotational dynamics. The approach, developed by Bommena et al., is tailored for attitude control actuators capable of producing variable-magnitude control torques (e.g., reaction wheels), which minimizes fuel consumption for translational motion and torque requirements for rotational maneuvers. In this formulation the rotational and translational dynamics are coupled to ensure that the optimal 6-DOF trajectory meets the defined boundary conditions and aligns the attitude motion with thruster pointing requirements, while guaranteeing at least local optimality of the roto-translational motion. Another key advantage of this formulation is that the translational motion is expressed in the inertial frame while the attitude motion remains in the body frame of the agents, thus eliminating the need for frame conversions between the two when analyzing the motion.
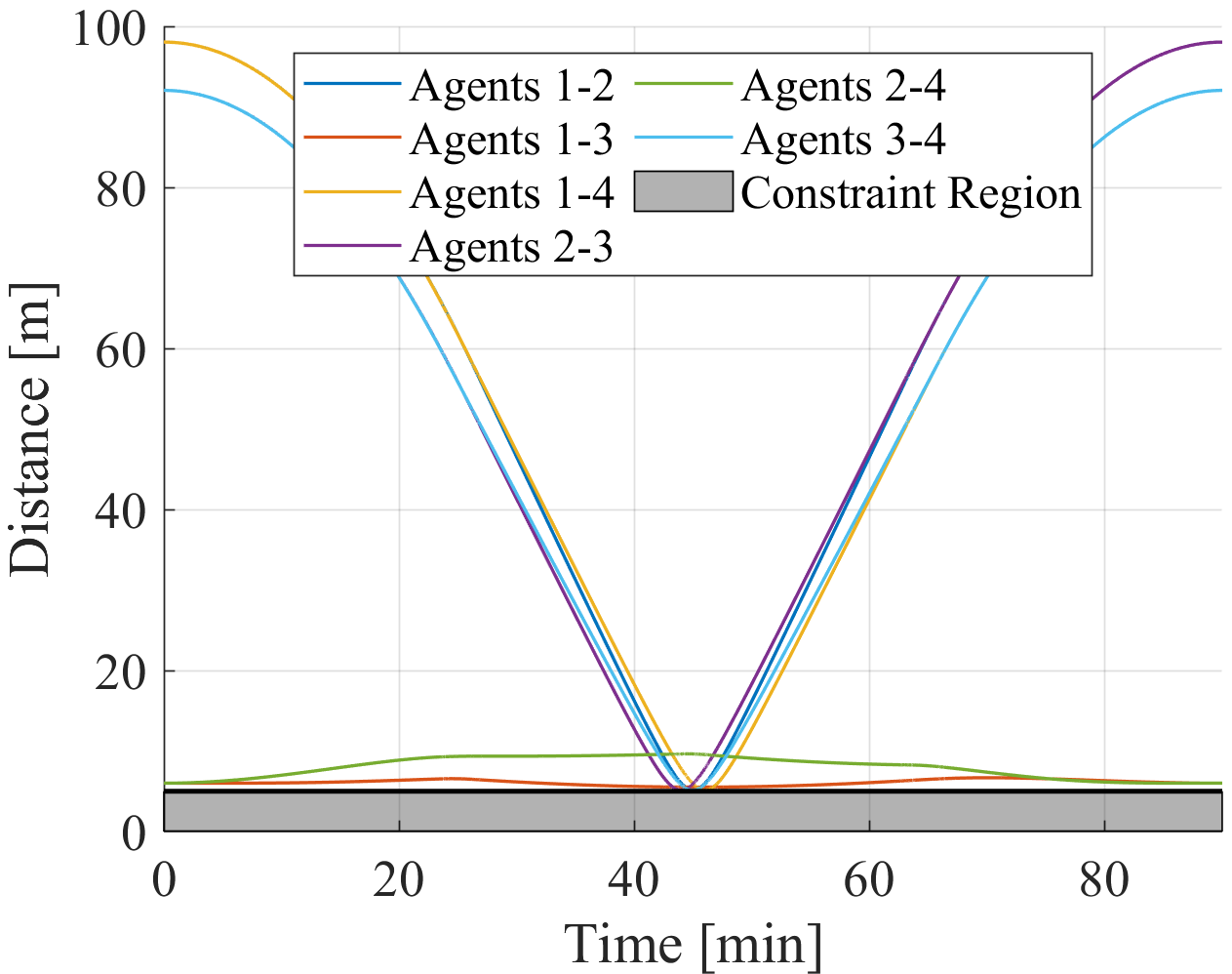
Multi-Agent 6-DOF Trajectory Optimization with Anti-collision Constraints
For large target spacecraft and structures, multiple agents can operate simultaneously to transfer components to and from the service vehicle, with each agent targeting a specific location on the target spacecraft. To ensure a safe and efficient servicing and assembly process, these agents must satisfy various operational constraints, such as anti-collision constraints. Bommena et al. developed a novel and versatile methodology that incorporates path constraints directly into the optimal control formulation without increasing the problem size (i.e., no additional state variables), while allowing the trajectory to be solved in a single arc. This lead to substantial improvements in computational efficiency compared to the current state-of-the-art.